Modular Design (Scalability)
Supports tricopter, quadcopter, hexacopter setups — flexible for multiple UAV applications.
Developing a Modular Communication System for UAVs Using Ultra-Wideband (UWB) Technology
This project focuses on the design and implementation of a modular communication system for drones using UWB technology. The system enables real-time communication between the flight controller and ESCs, overcoming traditional wiring limitations. It is suitable for advanced logistics applications and highly customizable UAV configurations.
Status: Completed
Supports tricopter, quadcopter, hexacopter setups — flexible for multiple UAV applications.
Decawave DWM1001C @ 6489.6 MHz, 499.2 MHz bandwidth, up to 6.8 Mbps for reliable low-latency links.
End-to-end delay within ~5 ms for motor control, validated via simulation and real-world tests.
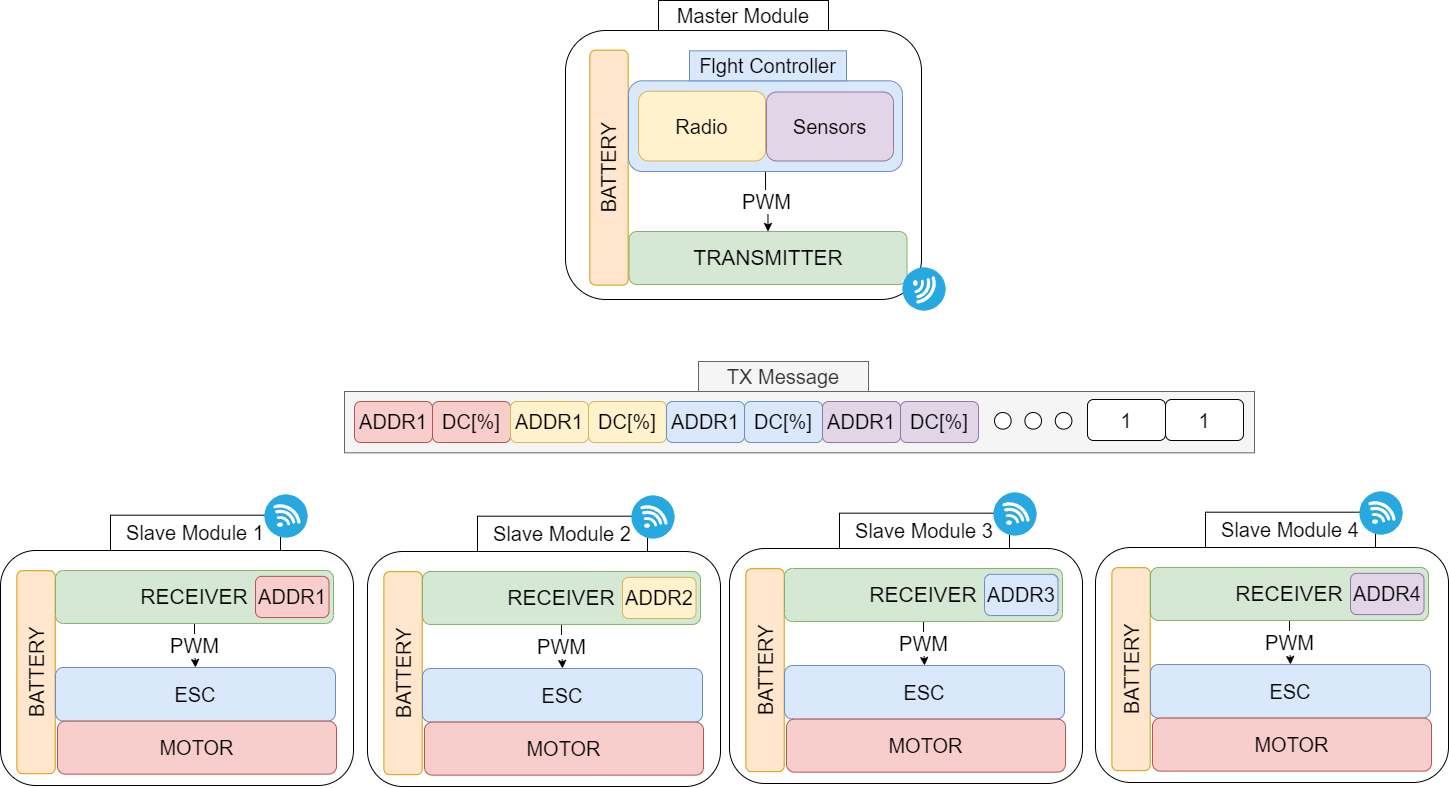
The architecture includes a master module that captures PWM signals from the flight controller, and multiple slave modules (each with ESC, motor, UWB receiver). Slaves synchronize motor control using PWM triggered by a master sync signal.
Experiments show stable flight despite introduced wireless delays. Hardware-in-the-loop simulations confirm robust control even around the 5 ms delay threshold, consistent with real-world outcomes.
Developed within the Embedded Systems Lab at the University of Trento (UniTrento DII), this project explores how any object can become a flying platform using modular and wireless UWB-based propulsion units. The concept eliminates traditional frames and cables — the payload itself becomes the drone’s structure.
Research Team:
Prof. Davide Brunelli (Coordinator) · Prof. Daniele Fontanelli · Dr. Luca Santoro · Dr. Matteo Nardello
Student Contributors:
Erik Mischiatti · Alessandro Assirelli · Paolo Furia · Marco Perini
Developed within the EES Lab at the University of Trento as part of the Embedded Systems course. Based on the University of Trento patent: “Wireless Control for Reconfigurable and/or Frameless Autonomous Vehicles.”
Published at the 2024 IEEE International Conference on Automation Science and Engineering (CASE): design and experimental validation of a wireless modular UAV architecture.