GNSS Front-End
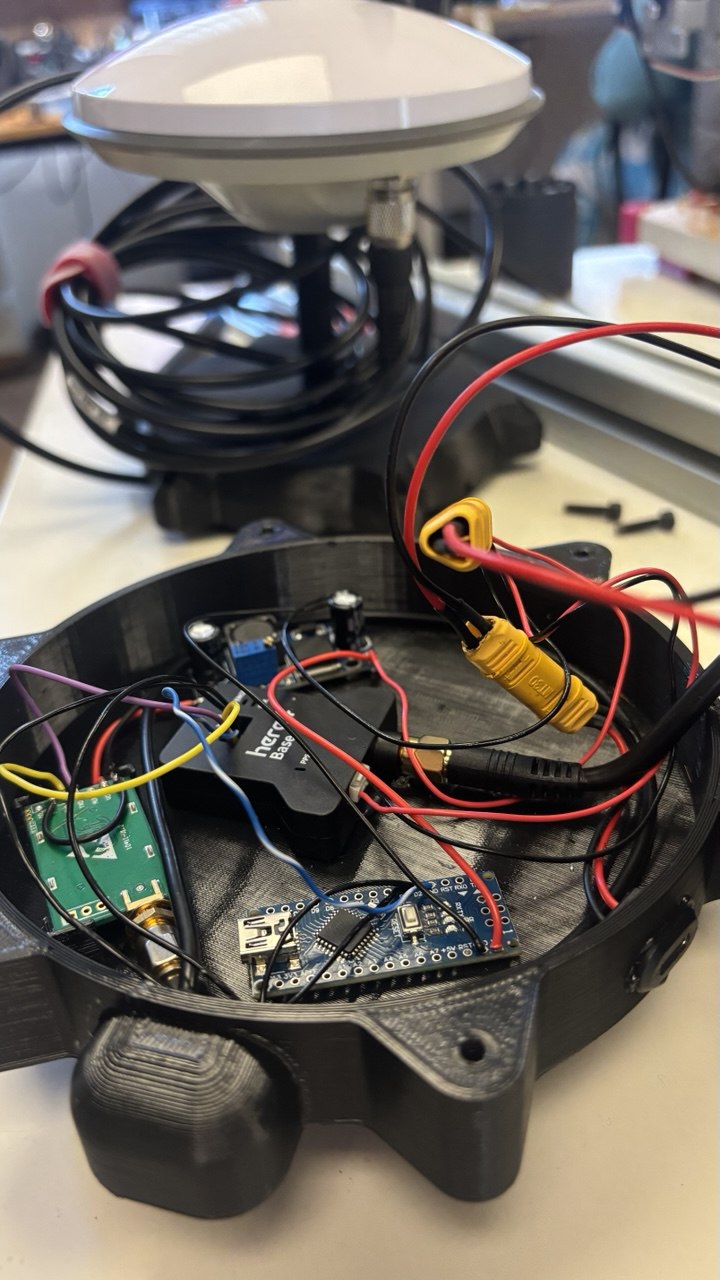
CubePilot Here4 Base (u-blox NEO-F9P) with external CS7624A antenna for high-precision multi-band reception.
The RTK Base Station acts as a ground reference system transmitting RTK correction data to drones or mobile rovers to reach centimeter-level positioning accuracy.
The final design includes a 3-part modular enclosure (Top, Middle, Bottom), housing all electronics, a rechargeable 18650 Li-ion pack, and a metal power button with LED indicator. The unit mounts directly on a tripod via a standard thread adapter.
CubePilot Here4 Base (u-blox NEO-F9P) with external CS7624A antenna for high-precision multi-band reception.
Ebyte E220-900T22D module running at 900 MHz to broadcast RTCM corrections over long range.
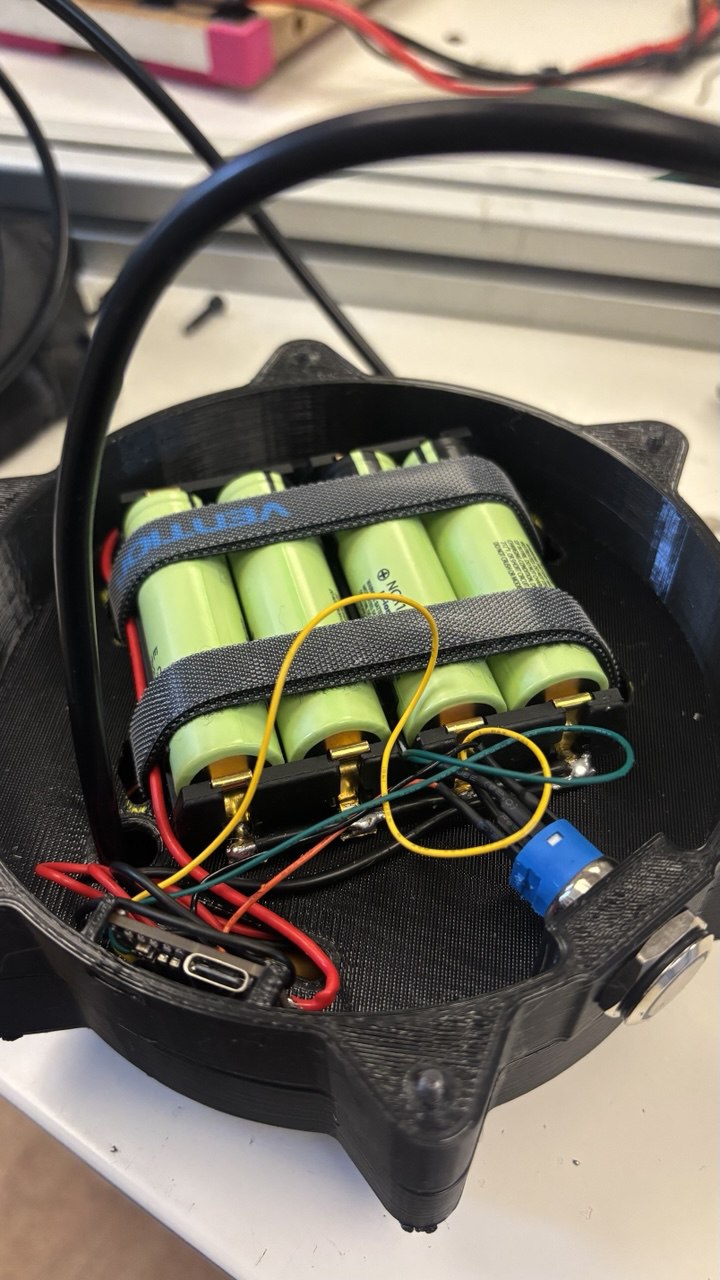
IP5310 (LX-LBC3.1) charger + boost module powering the system from 4 × 18650 cells with external USB-C and illuminated button.
Arduino Nano manages UART communication and automatically triggers the Survey-In process on the Here4Base at startup.
Three 3D-printed parts: Bottom (Here4Base + radio), Middle (battery + charger), and Top (antenna mount). Quick tripod attachment underneath.
IP5310 charger + boost module, LM2596 step-down (5 → 3.3 V), illuminated power button, and visible charge LEDs through the case window.

The system is powered by four 18650 Li-ion cells connected to the IP5310 charger + boost board, providing 5 V output. The 5 V rail feeds both the Here4Base and Arduino Nano, while the LM2596 regulator generates 3.3 V for the LoRa radio.
The illuminated metal button toggles the 5 V boost output, and its LED ring is powered from the same rail.
Version I: fully assembled, validated, and tested during field experiments, achieving stable centimeter-level accuracy in real drone localization setups.
Version II: documented as work in progress.
Version I complete; Version II remains documented as work in progress.
Final assembly — renders and real prototype photos.


The mechanical design of this RTK Base Station was inspired by Burks Builds — GNSS Base Station Prototype. The referenced project provided the original 3D design foundation, which was adapted for the CubePilot Here4Base integration, power system, and LoRa communication module.