Invariant Representation (DHB)
Encodes motion in a bidirectional Denavit–Hartenberg space, enabling robust reproduction across spatial configurations.
Leveraging Demonstration Learning and Invariant Representations for Modular Assembly and Cable Manipulation
This master’s thesis develops a documented robotic research prototype for manipulating rigid and deformable objects. The approach combines kinesthetic demonstration, invariant trajectory representations (DHB), and vision-based perception to insert Ethernet cables and interact with modular components under real-world constraints. The public summary should be read as partially reproducible: it depends on local hardware, calibration, and recorded data.
Status: Completed
Encodes motion in a bidirectional Denavit–Hartenberg space, enabling robust reproduction across spatial configurations.
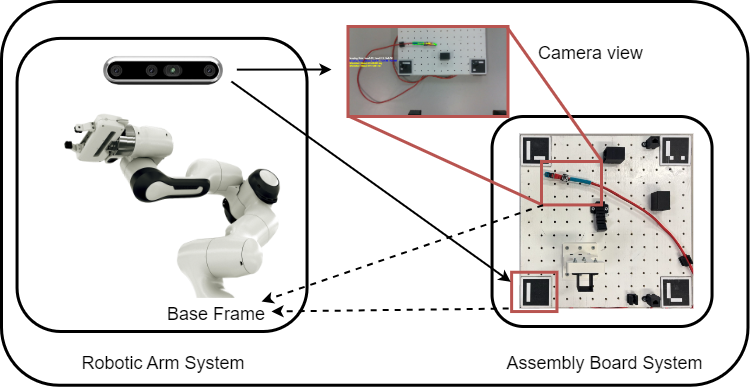
Intel RealSense depth sensing and ArUco markers provide 6D pose estimation and 3D environment awareness.
Board inspired by NIST benchmarks to evaluate task generalization under reconfigurable layouts.
Kinesthetic teaching for intuitive programming of cable manipulation skills.
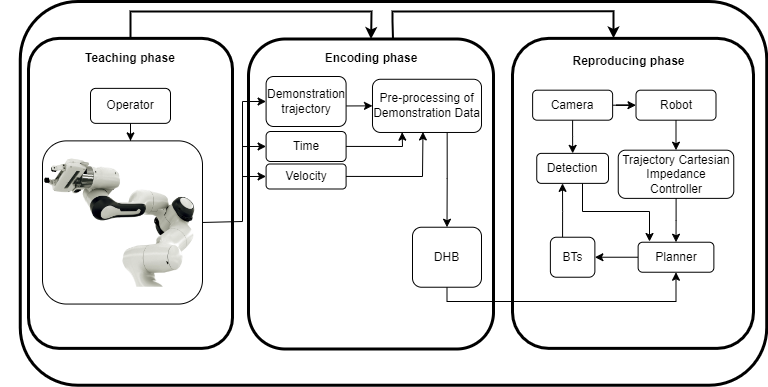
The robotic platform integrates a Franka Emika Panda arm, Intel RealSense D435i camera, and ROS-based control system. A perception module estimates the 6D pose of target objects, while DHB encodes the trajectory in a space-invariant form. Execution is coordinated through behavior trees and ROS action nodes.
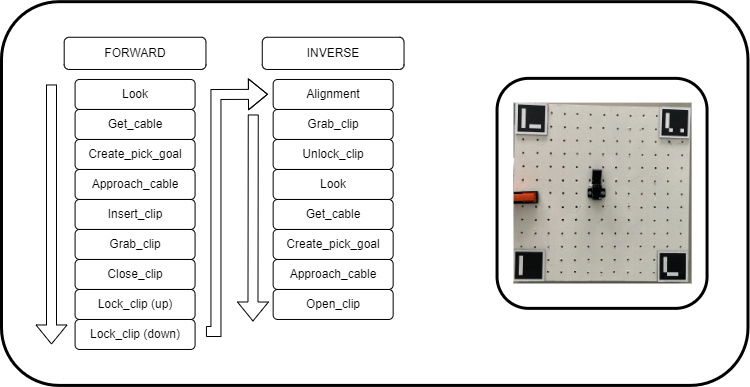
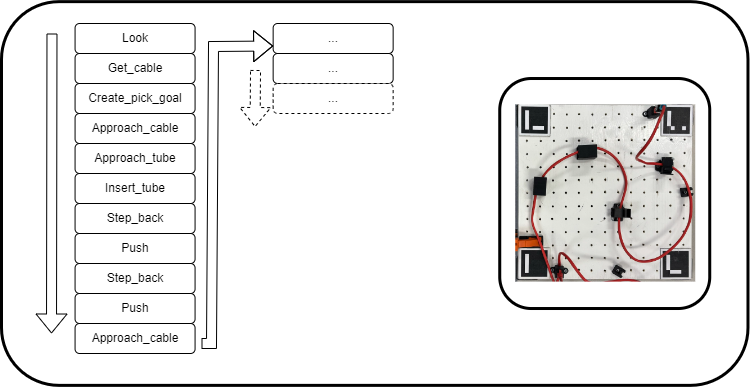
Three experimental scenarios were conducted:
The public materials show representative scenarios for clip insertion, longer modular paths, and board reconfiguration. The repository itself remains a research prototype, so results, behavior, and replayability depend on local hardware, calibration, and recorded data.
A single demonstration can be reused in various spatial setups, enabling robust task execution in different configurations thanks to the invariance properties of DHB.





Franka Emika Panda arm for precise motion execution and kinesthetic teaching.
Intel RealSense D435i depth camera + ArUco markers for 6D pose estimation.
ROS, Python, OpenCV, and custom DHB libraries for planning and control.
3D-printed boards and inserts designed for flexible, reconfigurable testing.
The thesis explores whether invariant representations can support tasks such as cable insertion and modular assembly. DHB supports trajectory generalization across configurations; future work would need stronger robustness for deformable objects, occlusions, and calibration changes.