Researcher / Test Engineer — MRS Group at FEE-CTU Prague
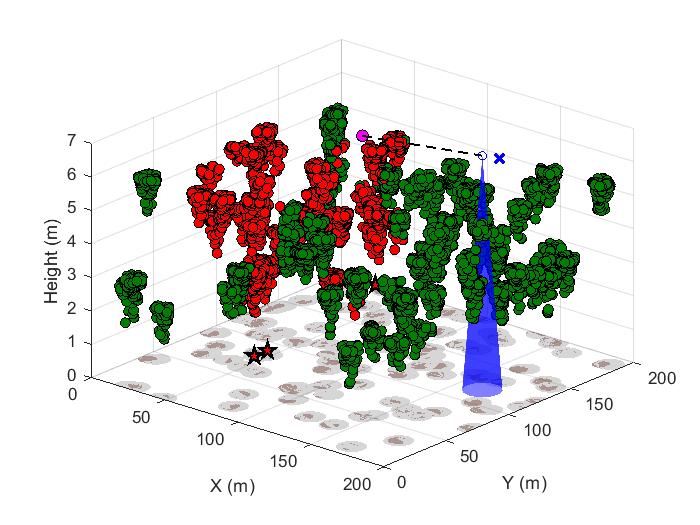
– Present · Prague · Eagle.One Drone Hunting System (in collaboration with Fly4Future s.r.o.)

Mechatronics Engineer with a strong passion for robotics, automation, and intelligent systems. I recently completed my Master's degree in Mechatronics Engineering, majoring in robotics and electronics. My work mainly revolves around learning from demonstration, modular robot design, and autonomous task execution—especially in real-world, uncertain scenarios.
Alongside my academic path, I’ve gained experience in UWB-based drone communication, embedded systems, and CAD/PCB design. I love working at the intersection of hardware and software to build robust, adaptive technologies.
Beyond my technical interests, I enjoy sports like running and swimming, as well as analog photography. Originally from Italy, I’m currently living in Prague, where I work, and actively exploring new opportunities to develop both professionally and personally.
– Present · Prague · Eagle.One Drone Hunting System (in collaboration with Fly4Future s.r.o.)
Master’s in Mechatronics (2022–2024) — focus on autonomous systems & robotics.

Master’s Thesis (2024) — imitation learning & 6D pose for task learning.
Erasmus Exchange (2023) — robotics, automation & mechanics.
Bachelor’s in Mechatronics (2017–2021)

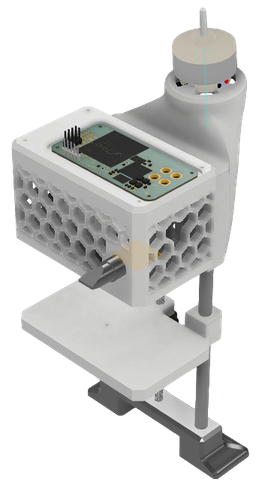
Portable GNSS RTK base station for high-accuracy positioning, in a compact modular enclosure with built-in battery and quick tripod mount.
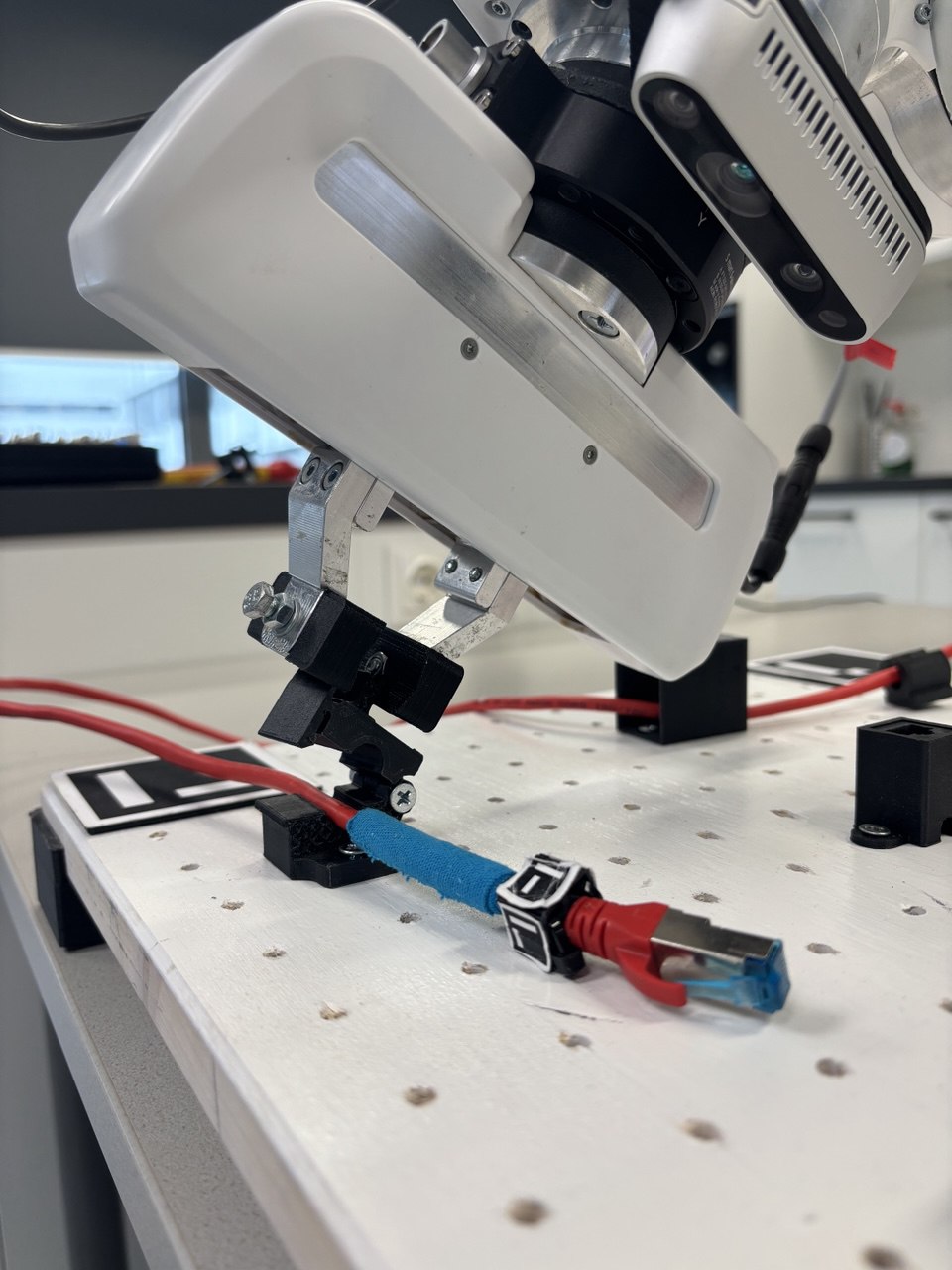
Invariant representations & learning from demonstration for wire manipulation, with behavior trees.
Modular communication system for drones, multi-agent coordination via UWB.
UAV/UGV for monitoring and early disease detection with hybrid sensors and data fusion.

AR solutions for learning, a CLab Trento project in collaboration with HIT.
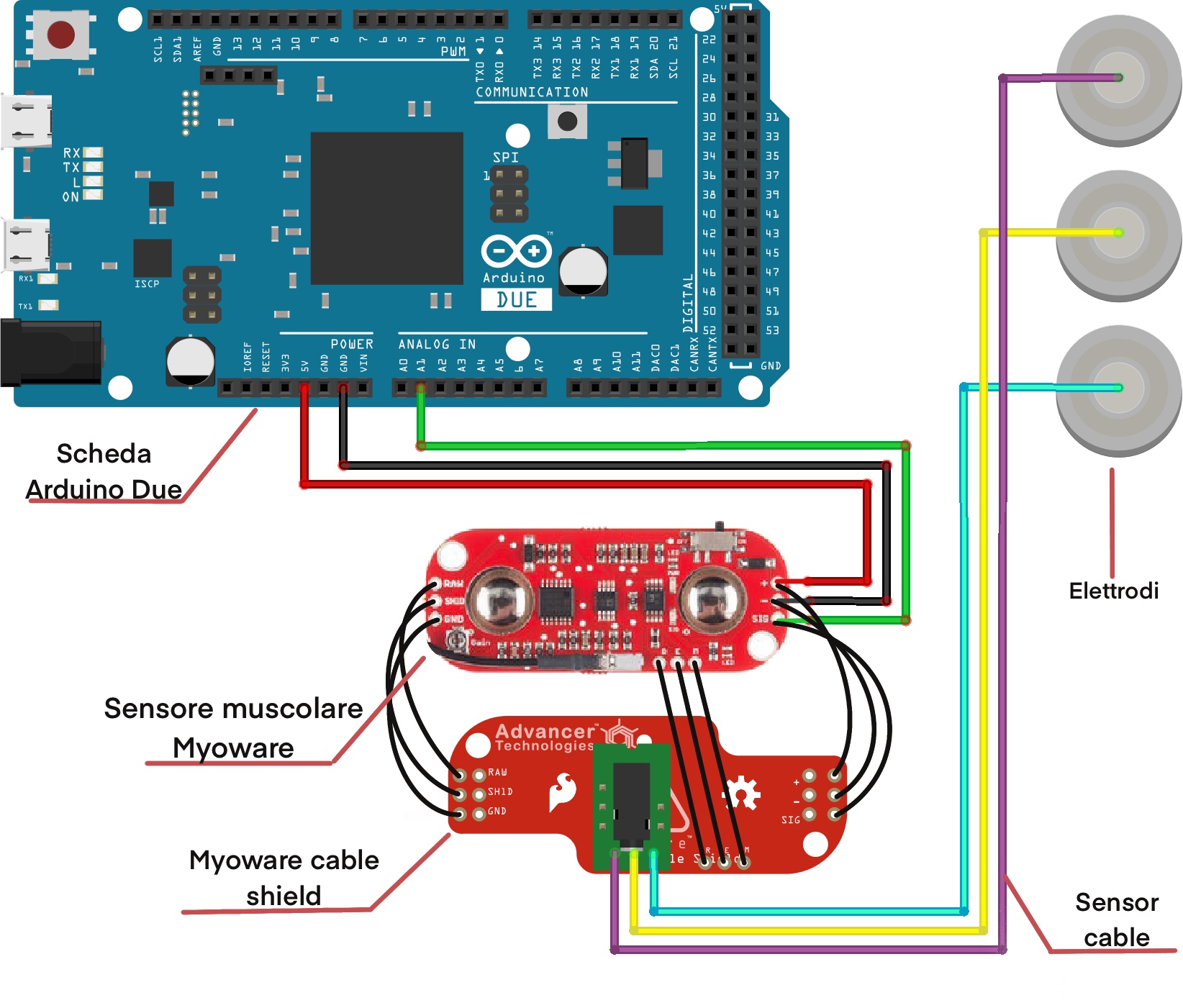
EMG analysis with Myoware sensors to correlate muscle activity and applied force.
Background rooted in Mechatronics, combining mechanical design, electronics, and control. Graduated both at Bachelor’s and Master’s level in Mechatronic Engineering, with focus on robotics, embedded systems, and automation.
Development of autonomous robotic systems integrating control, perception, and planning. Experience with Behavior Trees, ROS, and Gazebo for both simulation and real-world deployment.
Firmware design for STM32 and Arduino architectures, with experience in UART, SPI, I²C, and real-time communication. Integration of sensors, UWB modules, and motor drivers.
Mechanical modeling in SolidWorks, Fusion 360, and Onshape. PCB design using Fusion and EasyEDA.
Research in Learning from Demonstration and visual perception for manipulation tasks. Experience with computer vision, object detection, and pose estimation using OpenCV and deep learning frameworks.
Experience with Python and C++ for automation, data processing, and robotics pipelines. Experience with MATLAB for control system simulation and data analysis.
Version control with GitHub and GitLab, environment management via Docker and Apptainer. Linux user with solid experience in ROS-based build systems.













Feel free to connect with me through LinkedIn or email.